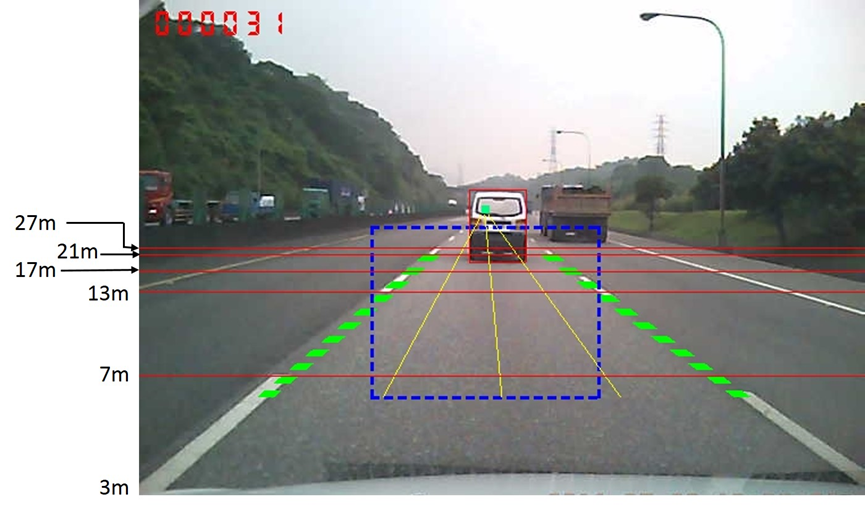
本實驗室研究ADAS已經很多年,主要方向為車道偏離警告、前車偵測、前車測距及防撞警告。我們發展的車道偏離警告系統,由攝影機中擷取行車路況影像資訊,利用適當的影像前置處理強化道路線特徵,分離道路線與路面找出道路線的位置,設置影像畫面感興趣的區域(Region of Interesting, ROI),就可以藉由道路線與ROI位置判定汽車是否偏離車道,並對駕駛人發出適當的警告。前車偵測系統,可以偵測前車的位置,在ADAS中是非常重要的偵測功能,做法是攝影機擷取行車影像,經過影像處理擷取出物件特徵後,利用車輛的對稱性來尋找影像中前車的可能位置。行車影像中對稱性物件眾多,所以搭配車框比例與貝氏分類機器學習增加前車辨識正確率。前車測距系統是利用交通部規定道路虛線標線距離,當作影像中的距離與現實中的距離轉換依據。攝影機擷取的影像做完影像處理後,找出虛線道路線,使影像上的距離轉換成現實與前車的距離。進一步利用機器學習得到與前車距離的安全係數,判斷前車是否威脅到本車。
Yu-Jie Jheng, Yu-Hua Yen, and Tsung-Ying Sun*, “A Symmetry-based Forward Vehicle Detection and Collision Warning System on Android Smartphone,” in Proc. International Conference on Consumer Electronics-Taiwan, May 26-28, 2015, Taipei, Taiwan.
Yu-Hua Yen, Chih-Li Huo, and Tsung-Ying Sun*, “Adaptive Lane Departure Warning System on Android Smartphone,” in Proc. International Conference on Consumer Electronics-Taiwan, May 26-28, 2014, Taipei, Taiwan.
Jiun-Hung Li, Chih-Li Huo, Yu-Hsiang Yu and Tsung-Ying Sun*, “Time Sequence based Lane-marking Identification,” in Proc. International Conference on System Science and Engineering, July 4-6, 2013, Budapest, Hungary.
Chun-Wen Hung, Chih-Li Huo, Yu-Hsiang Yu and Tsung-Ying Sun*, “Road Area Detection based on Image Segmentation and Contour Feature,” in Proc. International Conference on System Science and Engineering, July 4-6, 2013, Budapest, Hungary.
Fu-Hsaing Chi, Chih-Li Huo, Yu-Hsiang Yu and Tsung-Ying Sun*, “An Robust Tracking Approach for Vision-based Forward Vehicle Detection,” in Proc. International Conference on Fuzzy Theory and Its Application, pp. 352-359, Nov. 16-18, 2012, Taichung, Taiwan.
Fu-Hsaing Chi, Chih-Li Huo, Yu-Hsiang Yu and Tsung-Ying Sun*, “An Effective Approach for Forward Vehicle Detection with Tracking,” in Proc. 1st IEEE Global Conference on Consumer Electronics, pp. 244-247, Oct. 2-5, Tokyo, Japan.
Yu-Hsiang Yu, Fu-Hsaing Chi, Chih-Li Huo and Tsung-Ying Sun*, “A Self-Calibrating Distance Lookup Method For Camera-Equipped Vehicular System,” in Proc. 1st IEEE Global Conference on Consumer Electronics, pp. 384-387, Oct. 2-5, Tokyo, Japan.
Chih-Li Huo, Yu-Hsiang Yu and Tsung-Ying Sun*, “Lane Departure Warning System based on Dynamic Vanishing Point Adjustment,” in Proc. 1st IEEE Global Conference on Consumer Electronics, pp. 440-443, Oct. 2-5, Tokyo, Japan.
Fu-Hsaing Chi, Chih-Li Huo, Yu-Hsiang Yu and Tsung-Ying Sun*, “Forward Vehicle Detection System Based on Lane-Marking Tracking with Fuzzy Adjustable Vanishing Point Mechanism,” in Proc. 2012 IEEE International Conference on Fuzzy Systems within 2012 IEEE World Congress on Computational Intelligence, pp. 536-541, June 10-15, 2012, Brisbane, Australia.
Chih-Li Huo, Yu-Hsiang Yu, Jhih-Cheng Syu and Tsung-Ying Sun*, “Vehicle Warning System for Land Departure and Collision Avoidance: Using Fuzzy Decision Making,” in Proc. 2011 IEEE International Conference on Fuzzy Systems, pp. 1554-1559, June 27-30, 2011, Taipei, Taiwan.
Tsung-Ying Sun* and Wei-Chih Huang, “Embedded Lane-Marking Tracking System,” in Proc. 13th IEEE International Symposium on Consumer Electronics, pp. 627-631, May 25-28, 2009, Kyoto, Japan.
Tsung-Ying Sun*, Wei-Chih Huang, and Shang-Jeng Tsai, “Robust Lane-Marking Tracking Algorithm based on Boundary detection and Kalman Filter,” in Proc. 9th International Symposium on Advanced Vehicle Control, Kobe, Japan, pp. 164-167, Oct. 6-9, 2008.
Tsung-Ying Sun* and Shang-Jeng Tsai, “Fuzzy Adaptive Mechanism for Improving the efficiency and Precision of Vision-based Automatic Guided Vehicle Control,” in Proc. International Conference on Systems, Man and Cybernetics, Hawaii, USA, Oct. 10-12, 2005.
Tsung-Ying Sun*, Shang-Jeng Tsai, Jiun-Yuan Tseng, and Yen-Chang Tseng, “The Study on Intelligent Vehicle Collision-Avoidance System with Vision Perception and Fuzzy Decision Making,” in Proc. IEEE Intelligent Vehicles Symposium, pp. 112-117, Las Vegas, Nevada, U.S.A., June 6-8, 2005.
Tsung-Ying Sun, Pei-Dan Chan, Shang-Jeng Tsai, Chan-Cheng Liu, and Wei-Chih Huang, “Face detection and eye tracking algorithm based on HSV Color Model for vehicle driver,” The 21th IPPR Conference on Computer Vision Graphics and Image Processing, CVGIP 2008, 佛光大學,Aug. 24-26, 2008.



{kind=link}
{kind=link}
{kind=link}